易康(eCognition)软件,熟悉遥感面向对象分类的朋友想必都不会陌生,德国几位老工程师开发出来的一个面向对象分类的非常牛的软件,可以用于医学和遥感等多光谱影像的面向对象分类。
面向对象分类其实在学界统称基于对象的图像分析(OBIA),而在遥感等地学细分领域中,其称为基于地理对象的图像分析(GEOBIA),这种算法优势非常明显。与普通的像元暴力迭代分类不同,对象的概念体现在同质像元的集合,这样能够很大程度去除“椒盐效应”,区别于模糊分类的效果,其对象边界明显。
面向对象的处理方法中最重要的一部分是图像分割。现有图像分割算法主要有分水岭、SLIC、quickshift以及经典图割(Graphcut)等,按用途的不同,前三者会区分到细分领域中使用,比如医学中最多使用的往往是分水岭和SLIC,遥感中使用的最多是quickshift,其次SLIC。
实际上,ecognition已经很好地满足了现有研究前言的需求,不知道养活了多少文章,但是关键它是商业软件,虽然能破解但是作为开源GIS爱好者,其实能够写出它的开源方案,应该是一个小小心愿吧。本次分割我用的是一副自己裁剪出来的小型数据,主要是为了省时间和方便写文章。

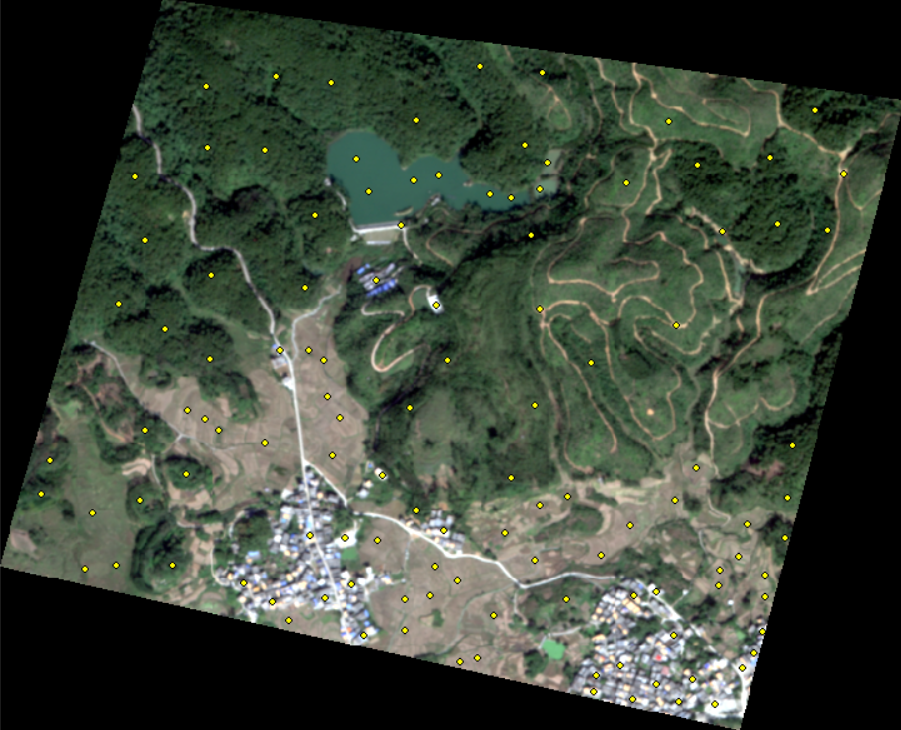
区域内有水有植被、裸地、建筑用地,基本大类都全了,应该是不差的实验数据。
分割算法
先介绍我用的其中两种分割算法吧。
SLIC分割是基于种子数的分割结果,按照设定的超像素个数,在图像内均匀的分配种子点。所以种子数量是影像分割的效果和速度的关键,数量越多,分割越精细,分割时间越长。不过在最近的实验中发现,种子数对时间的影响程度并不算大,而在像素数量的影响程度远大于前几个指标。在做10000*10000的像元分割时,种子数10000的分割时间达到了5min。当然这也不算很严谨的实验数据,还需要多做几个实验才能得出规律。在scikit-imagepython包中,SLIC已经被集成,当然自己写也不是什么问题,但是造轮不可取。该算法中的参数很多,但是主要还是分割种子数和紧凑性,其中紧凑性指示可选平衡色彩接近度和空间接近度,数值越高,空间接近度越重,使得超像素形状更加平方/立方,这个参数在一般情况的调参中,一般以10倍的大小浮动分割,查看情况,例如0.01,0.1,1,10,100。其他参数就按需设置了,这里不做赘述。
quickshift即快速位移聚类算法,也是非常强大的一种分割算法,基于核平均移动的近似值,可以在多尺度上计算分层分段,一定程度上对遥感尺度效应有奇效。quickshift最重要的参数有三两个,一个是ratio,是介于0和1之间平衡色彩空间接近度和图像空间接近,较高的值会增加色彩空间的重量。kernel_size是可选用于平滑样本密度的高斯内核宽度。越高意味着越少的群集。max_dist是可选数据距离的切点。越高意味着越少的群集。
现在先来看下用scikit-image包处理遥感tif影像的效果,代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
|
from skimage.segmentation import mark_boundaries
from osgeo import gdal
from skimage.segmentation import slic, quickshift
def read_img(filename):
dataset = gdal.Open(filename)
im_width = dataset.RasterXSize
im_height = dataset.RasterYSize
im_geotrans = dataset.GetGeoTransform()
im_proj = dataset.GetProjection()
im_data = dataset.ReadAsArray(0, 0, im_width, im_height) #0, 0, im_width, im_height
del dataset
return im_width, im_height, im_proj, im_geotrans, im_data
def write_img(filename, im_proj, im_geotrans, im_data):
if 'int8' in im_data.dtype.name:
datatype = gdal.GDT_Byte
elif 'int16' in im_data.dtype.name:
datatype = gdal.GDT_UInt16
else:
datatype = gdal.GDT_Float32
if len(im_data.shape) == 3:
im_bands, im_height, im_width = im_data.shape
else:
im_bands, (im_height, im_width) = 1, im_data.shape
driver = gdal.GetDriverByName("GTiff")
dataset = driver.Create(filename, im_width, im_height, im_bands, datatype)
dataset.SetGeoTransform(im_geotrans)
dataset.SetProjection(im_proj)
if im_bands == 1:
dataset.GetRasterBand(1).WriteArray(im_data)
else:
for i in range(im_bands):
dataset.GetRasterBand(i + 1).WriteArray(im_data[i])
del dataset
img_path = r".\test.tif"
temp_path = r".\classification"
im_width, im_height, im_proj, im_geotrans, im_data = read_img(img_path)
im_data = im_data[0:3]
temp = im_data.transpose((2, 1, 0))
#segments_quick = quickshift(temp, kernel_size=3, max_dist=6, ratio=0.5)
segments_quick = slic(temp, n_segments=25000, compactness=10.)
mark0 = mark_boundaries(temp, segments_quick)
save_path = temp_path + "temp.tif"
re0 = mark0.transpose((2, 1, 0))
write_img(save_path, im_proj, im_geotrans, re0)
|
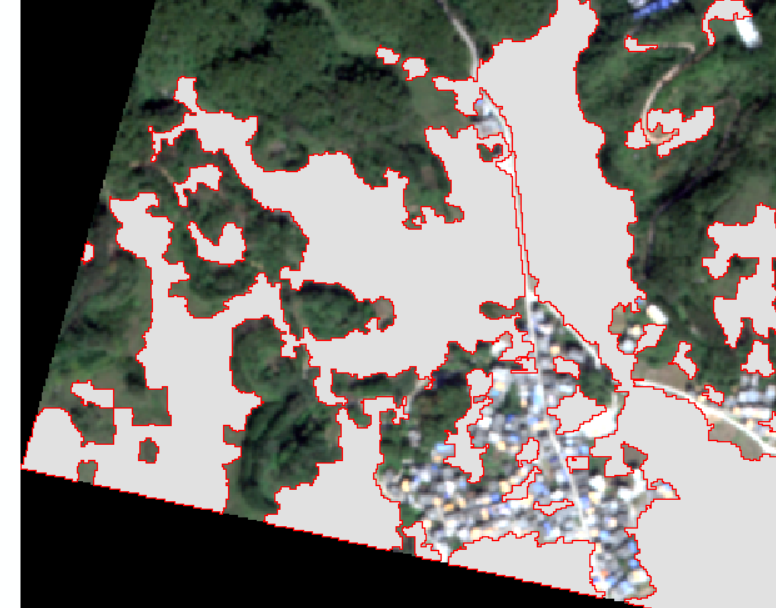
返回的是一个二维数组,每个聚类的块的像元值都是一样的,而这个值仅代表这个块的顺序,不代表任何遥感或者物理意义。可以把这些值叫做ID。这些ID值,也是后续作为二维空间定位的重要数值。简单看一下这些分割以后的图像长什么样:
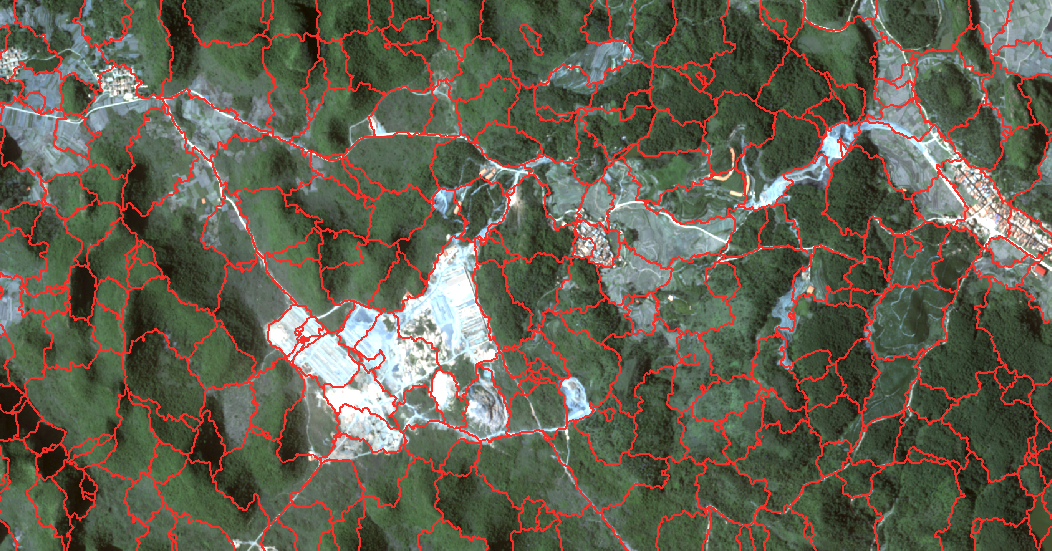
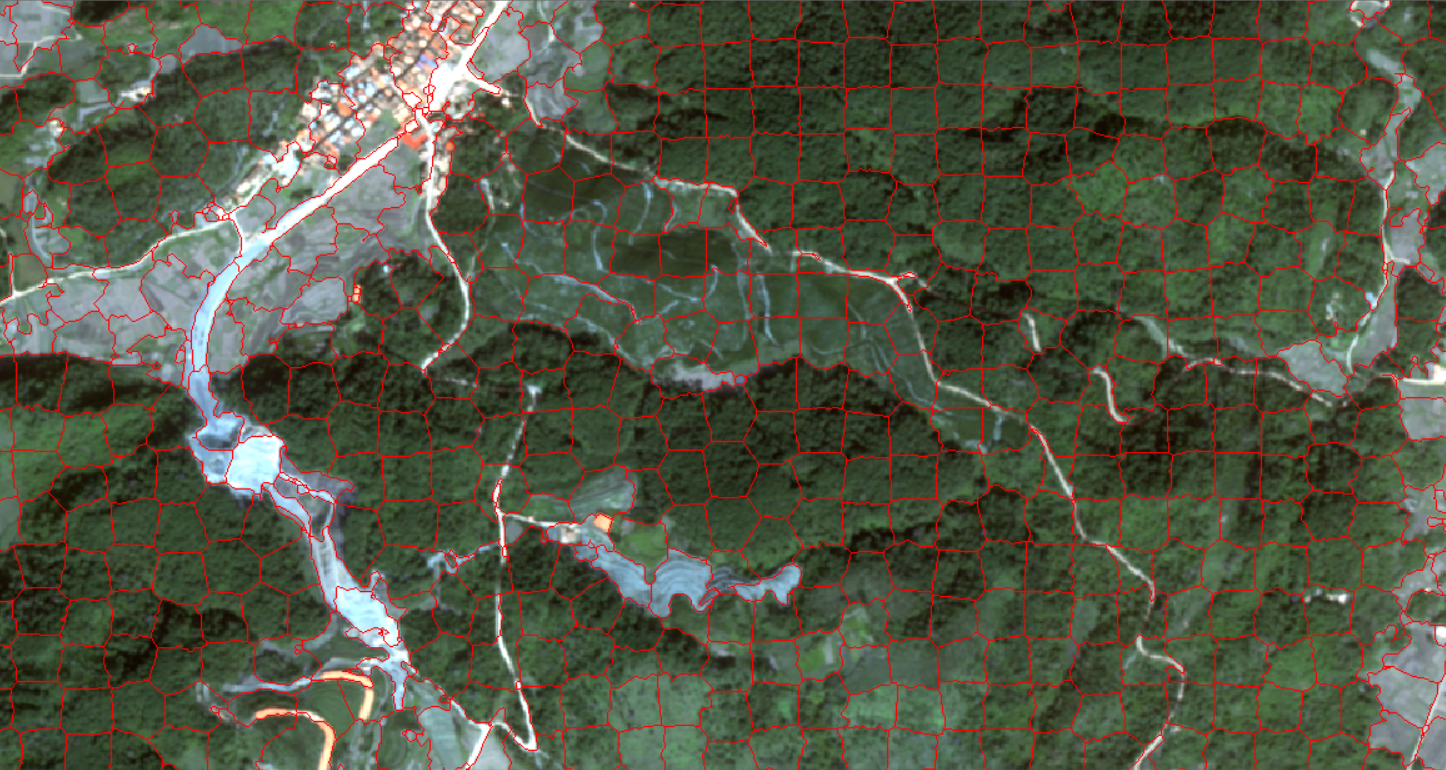
当然,代码执行完之后输出的其实是栅格tif,但是栅格文件不方便查看,所以我把栅格转成了矢量线,叠合在原来的多光谱遥感影像上,这样读者可以大致感受分割的情况。
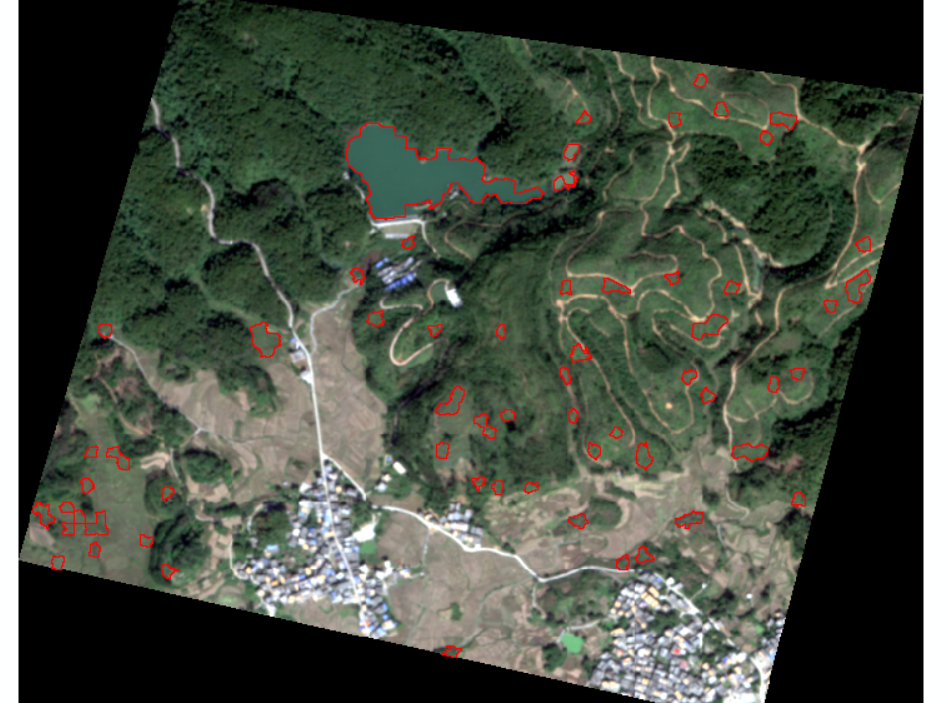
地类数据
地物类别的数据是我自己用arcmap制作的,影像被我裁剪成了700*500的像元数以后,在该影像上根据目视简单分了几个大类:
- 林地
- 裸地
- 建筑
- 水域
按照机器学习惯例,需要把label数据拆分为测试集和验证集,比率是7:3,这里利用geopandas能够轻松实现,代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
|
gdf = gpd.read_file(r".\sub_sample.shp")
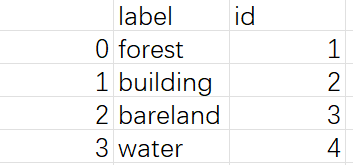
class_names = gdf['label'].unique()
class_ids = np.arange(class_names.size) + 1
df = pd.DataFrame({'label': class_names, 'type': class_ids})
df.to_csv(r".\temp.csv")
gdf['type'] = gdf['label'].map(dict(zip(class_names, class_ids)))
gdf_train = gdf.sample(frac=0.7)
gdf_test = gdf.drop(gdf_train.index)
gdf_train.to_file(r".\train_data1.shp")
gdf_test.to_file(r".\test_data1.shp")
|
构建特征
还是那句老话:
创造新的特征是一件十分困难的事情,需要丰富的专业知识和大量的时间。机器学习应用的本质基本上就是特征工程。——Andrew Ng
作为遥感的面向对象分类,可选的特征数可达上百个,一般选用的特征包括各种植被指数、均值、方差、标准差、灰度共生矩阵等,还有研究者利用其他如物候、温度等数据参与特征构建,然后进行特征优选,最后把特征放入随机森林训练器进行分类,本次实验重点在于python的实现,所以并没有构建过多的特征,而少量的特征意味着不需要进行特征优选,省了很多步骤。
值得一提的是,在特征构建这一步中,所花费的时长是分割的好几十倍,因此如果影像很大,还需要写多线程去加速特征构建过程。在10000*10000像元数的影像中,仅有三个特征的训练时长达到了1.5小时。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
def segment_features(segment_pixels):
features = []
npixels, nbands = segment_pixels.shape
for b in range(nbands):
stats = scipy.stats.describe(segment_pixels[:, b])
band_stats = list(stats.minmax) + list(stats)[2:]
if npixels == 1:
band_stats[3] = 0.0
features += band_stats
return features
segment_ids = np.unique(segments)
objects = []
object_ids = []
for id in segment_ids:
segment_pixels = temp[segments == id]
object_features = segment_features(segment_pixels)
objects.append(object_features)
object_ids.append(id)
|
地类矢量转栅格
这一步是为了能让地类值和影像的对象落在同一区域,从而将影像中的分割对象同化为实际地物类别。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
train_fn = r".\train_data1.shp"
train_ds = ogr.Open(train_fn)
lyr = train_ds.GetLayer()
driver = gdal.GetDriverByName('MEM')
target_ds = driver.Create('', im_width, im_height, 1, gdal.GDT_UInt16)
target_ds.SetGeoTransform(im_geotrans)
target_ds.SetProjection(im_proj)
options = ['ATTRIBUTE=tyPE']
gdal.RasterizeLayer(target_ds, [1], lyr, options=options)
data = target_ds.GetRasterBand(1).ReadAsArray()
ground_truth = target_ds.GetRasterBand(1).ReadAsArray()
ground_truth = ground_truth.transpose((1, 0))
classes = np.unique(ground_truth)[1:]
|
最终得到带有地物类别数据的栅格点数据。
特征匹配
将得到的栅格点真实地物数据通过迭代与影像对象相匹配后,通过迭代器寻找对象的相应特征。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
|
segments_per_class = {}
for klass in classes:
segments_of_class = segments[ground_truth == klass]
segments_per_class[klass] = set(segments_of_class)
intersection = set()
accum = set()
for class_segments in segments_per_class.values():
intersection |= accum.intersection(class_segments)
accum |= class_segments
assert len(intersection) == 0, "Segment(s) represent multiple classes"
print("adjust complete")
end3 = time.time()
print('Running time2: %s Seconds'%(end3-start3))
print("start train randomforest classification")
start4 = time.time()
train_img = np.copy(segments)
threshold = train_img.max() + 1
for klass in classes:
class_label = threshold + klass
for segment_id in segments_per_class[klass]:
train_img[train_img == segment_id] = class_label
train_img[train_img <= threshold] = 0
train_img[train_img > threshold] -= threshold
training_objects = []
training_labels = []
for klass in classes:
class_train_object = [v for i, v in enumerate(objects) if segment_ids[i] in segments_per_class[klass]]
training_labels += [klass] * len(class_train_object)
training_objects += class_train_object
|
在实际的影像样本构建过程中,有的地物样本可能彼此距离相差较小,造成两个或多个样本落在同一个分割区域,这样会导致特征匹配迭代无限进行下去,所以我们要从两个或多个样本中取其一,上面的脚本的作用即是如此。
分类
万事俱备。最后利用scikit-learn的随机森林分类器,对样本分割块和其他未定义分割块进行预测,最后将结果输出到栅格中。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
|
def PolygonizeTheRaster(inputfile,outputfile):
dataset = gdal.Open(inputfile, gdal.GA_ReadOnly)
srcband=dataset.GetRasterBand(1)
im_proj = dataset.GetProjection()
prj = osr.SpatialReference()
prj.ImportFromWkt(im_proj)
drv = ogr.GetDriverByName('ESRI Shapefile')
dst_ds = drv.CreateDataSource(outputfile)
dst_layername = 'out'
dst_layer = dst_ds.CreateLayer(dst_layername, srs=prj)
dst_fieldname = 'DN'
fd = ogr.FieldDefn(dst_fieldname, ogr.OFTInteger)
dst_layer.CreateField(fd)
dst_field = 0
gdal.Polygonize(srcband, None, dst_layer, dst_field)
classifier = RandomForestClassifier(n_jobs=-1)
classifier.fit(training_objects, training_labels)
predicted = classifier.predict(objects)
clf = segments.copy()
for segment_id, klass in zip(segment_ids, predicted):
clf[clf == segment_id] = klass
# temp = temp.transpose((2, 1, 0))
mask = np.sum(temp, axis=2)
mask[mask > 0.0] = 1.0
mask[mask == 0.0] = -1.0
clf = np.multiply(clf, mask)
clf[clf < 0] = -9999.0
clf = clf.transpose((1, 0))
clfds = driverTiff.Create(r"D:\Data\testdata\classification\result.tif", im_width, im_height,
1, gdal.GDT_Float32)
clfds.SetGeoTransform(im_geotrans)
clfds.SetProjection(im_proj)
clfds.GetRasterBand(1).SetNoDataValue(-9999.0)
clfds.GetRasterBand(1).WriteArray(clf)
clfds = None
end4 = time.time()
outputfile = r".\result2.shp"
print('Running time2: %s Seconds'%(end4-start4))
PolygonizeTheRaster(r".\result.tif",outputfile)
|
当然还是上文的原因,分类在影像中的标记ID是1、2、3等等数值,因此用一般的栅格查看软件很难从肉眼进行查看。这里为了方便读者查看以及制图,我还进行了栅格转矢量的操作,这样放到arcmap中能清晰的查看分类情况。
最后的分类结果:
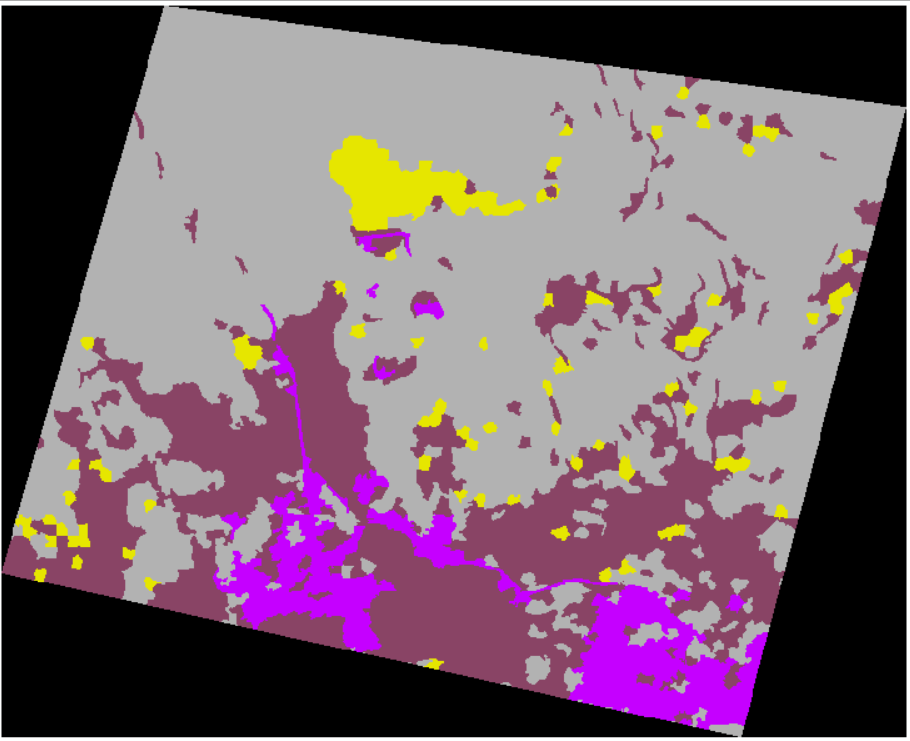
再看下细节:



森林用地的话,大体还是分类非常完美的。


对人类活动区也是得到了比较好的分类效果。
 裸地也很棒
裸地也很棒
 水系的分类效果就很差了,原因可能是特征不够。
水系的分类效果就很差了,原因可能是特征不够。
结语
总的来说分类结果还是听良好的,一方面是研究区小,另一方面我选的样本点也足够多,目前还没有在大幅影像上尝试进行分类,我的笔记本光是特征构建都要一个半小时,实在是做不了。
面向对象分类是本科大三一直和老师研究的内容之一,原本是探讨尺度效应和多尺度分割的契合点,不过随时间的推进没能实验出什么好效果,那会用易康不停地调参数,不停地实验,有时候调到了半夜两三点都正常。很可惜那时候python学的不精,没能利用好现有的资源高效的进行试验,不然可能又能有一篇好论文了。
不过这也算是了却了一番心愿吧,一直很感谢本科老师的悉心培养,这个算法的开源实现,意味着这个实验念叨到今天也算可以放一放了。接下来的技术文可能会更着重深度学习语义分割网络的心得分享。
